
Serasidis says "Nowadays, USB is the most popular connection connection between PC and peripherals such as AVR programmers, printers, scanners etc. For that reason I had to modify my old serial AVR In-System-Programmer (ISP) to work with USB connection. You can say, "use a USB to Serial adaptor to connect your AVR ISP with your PC". Yes, that could be a solution but it would cost me more money than a singe FT232BM chip because I had to include an USB to RS232 adaptor and a power supply for my programmer. (almost €30)".
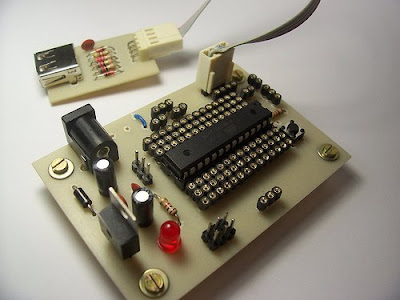
So, the solution was to replace the two transistors, that were used to adapt the RS-232 voltage levels to TTL voltage levels, with a USB to RS-232 chip such as FT-232BM.
This programmer worked perfect with AVRprog (zip file) but it could work with AvrOspII V5.47 also.
Download the source code, firmware, programming software, schematic and PCB for this programmer here
[source]
So, the solution was to replace the two transistors, that were used to adapt the RS-232 voltage levels to TTL voltage levels, with a USB to RS-232 chip such as FT-232BM.
This programmer worked perfect with AVRprog (zip file) but it could work with AvrOspII V5.47 also.
Download the source code, firmware, programming software, schematic and PCB for this programmer here
[source]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}